
2014年
2013年
2013/10/31 Locomo: オープンソース・ロボットプロトタイピングボード(※旧ページ)
五十嵐ERATOで働いていたとき、ロボット行動デザイングループという研究チームに所属していたので、研究の過程でPCから遠隔制御できる「動くモノ」をいろいろ作りました。
卓上サイズのロボット、インスタントコーヒーや角砂糖を一定量出してくれる装置、水道の蛇口や電気ポットなどなど。
マイコンにArduinoを使うことが多かったのですが、ことあるごとに無線モジュールとモータドライバ(あるいはMOS-FET)を組み合わせた基板を作っていたので、「モータを繋いですぐに無線で動かせるひとまとまりのハードウェアが欲しいな」と思うようになりました。
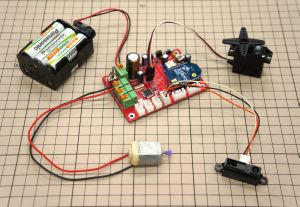
それで作ったのが「Locomo(ロコモ)」です。Locomoは、最大3個のDCモータと最大2個のサーボモータを無線コントロールできるArduino互換ボードです。
Locomoの開発情報はオープンソースで、販売も行っています。
Make Faire Tokyo 2013でLocomoを展示します!
「明治大学 先端メディアサイエンス学科 渡邊恵太研究室」ブースにて一緒にLocomoを展示します。 Locomoの作例として、スーファミのコントローラで無線操縦できるロボットのデモをします。 スーファミのコントローラ側はArduinoとXBeeで構成されています。 こうした無線通信が手軽にやれるのがXBeeのいいところですね。 |
2013/7/29 取材していただきました
JST(科学技術振興機構)のニュースチャンネルで、科学コミュニケーションに携わる人々を紹介するシリーズに登場させていただきました! 「工学ナビ」として取材されるのはおそらく今回が初めて。
2013/5/9 個人サイトも作りました
4月より明治大学の新設学部である総合数理学部・先端メディアサイエンス学科に専任講師として着任しました。 それに伴い自分の個人サイト(s-hashimoto.org)も立ち上げました。こちらのサイトもどうぞよろしくお願いします。
僕が所属している学科では学部一年生から研究室配属という斬新な試みを行っています。 これにより学生さんは入学してすぐに最先端の研究に触れたり教員と親睦を深めたりすることができます。 その甲斐あって、プログラミングやコンテンツに関する勉強会が各所で行われるなど活発な活動が行われています。 新しい環境をこれから作っていく勢いを持った一期生と教員のなせる業ですね。今後の展開が楽しみで仕方がありません。
2013/2/4 11年目の工学ナビ
昨年の2012年12月21日に工学ナビが立ち上げ10周年を迎えました。11年目である今年もまたいろいろと新しいことをやっていきたいと思っています。 4月からは明治大学の新設学部である総合数理学部・先端メディアサイエンス学科に専任講師として着任することになりました。 今後も拡張現実感とロボットを組み合わせたヒューマンインタフェース研究を続けていくつもりです。 キャンパスは中野駅前に新しく建造されました(超綺麗!)。中野は利便性がとても良い環境です。秋葉原へも電車で一本なので気軽にパーツを買いに行けて良いですね。 同僚となる教員陣も個性豊かな方ばかりで、国内におけるHuman-Computer Interaction研究の新たな拠点として注目されています。 これから一緒に仕事をしていくのがとても楽しみです。
|
現在(2013年3月末まで)は、明治大学で"兼任"講師として「コンピュータビジョン」という講義を担当しています。 毎年講義の中でカメラや画像処理を使った作品づくりを実施し、最後に発表会をやっているのですが、今年も実に個性的な作品が揃いました。 以下よりご覧ください(ちなみにこの講義は次年度以降も続きます!)。 コンピュータビジョン最終課題作品集(2012年度)
|
2012年
2012/7/23 ロボット×AR=ロボティクス・ノーツ
「ロボティクス・ノーツ」(XBox版)をプレイしました. 個人的には仕事としてロボットのインタフェースとARについての研究者をやっているので,テーマとしてそのあたりを扱っている本作には発売前から注目していました. 前作「シュタインズ・ゲート」のように,終盤でいろんな伏線を回収して凄まじいカタルシスを味わわせてくれることを期待したのですが,残念ながら不完全燃焼ぎみでした. ただ,要所要所ではファンサービスがぼちぼちあって楽しませてくれました(あの人が出てきたりとか). 物語中盤で出てくるロボットとARを組み合わせるというアイデアは,かつて僕が作っていたTouchMeというシステムと似たところがあり,勝手ににやけていました. この作品を通してロボットとARの両方に興味を持ってくれる人が増えるといいなぁと期待しています.
2012/4/5
フランスに一週間ほど行ってきました.メインの目的はLavalVirtualというバーチャルリアリティの国際会議への参加です. LavalVirtualはラヴァルという街で毎年開かれているイベントです.ラヴァルは風景が綺麗で静かな街です.ご飯も美味しい. フランス語はわからないので,現地の学生アルバイトに助けてもらいながら英語で説明.5日間のハードな展示でした. その後,レンヌにあるINRIA(フランス国立情報学自動制御研究所)を訪問してバーチャルリアリティの研究センターを見せてもらったりディスカッションしたりしました. レンヌは都会だけどパリのようにゴミゴミしてないので雰囲気が良いです.研究所の設備は素敵だし,ご飯も美味しいので,留学するチャンスがあればぜひここに行きたい. 最後はパリに寄ってルーブル美術館とかノートルダム寺院を見てきました.実サイズで見る絵画の迫力は素晴らしく,奥行き感すら感じました. 本やディスプレイで見るのとでは全然印象が違いますね.「民衆を導く自由の女神」や「ナポレオン1世の戴冠式」が見れて満足. 一方でモナリザって案外残念な展示のされ方してるんだなと思ったり.というわけで,フランス最高.
イベントのお知らせです.SENSACT(センサクト)という新しいトークイベントの企画を開始しました. 今回はセンサとアクチュエータというでの電子パーツレベルの視点でインタラクション技術を俯瞰しようという趣旨のイベントです. 詳細は以下からご覧ください.
SENSACT公式サイト
2012/3/17
本日,僕の3冊目の単著である「ARプログラミング―Processingでつくる拡張現実感のレシピ―」(オーム社)が発売になりました! 前作のARToolKit本を出して以来,TwitterなどでAR関係のプログラミング事情を俯瞰していたのですが, 「ARToolKitのインストールがやっと終わった…」「DLLがないって怒られた(´・ω・`)」などの最初の導入のステップで躓く声や, 「ARやりたいけどC言語わからないし…」というようなプログラミングに対する苦手意識が先行する例が数多く見られました. そんな状況を鑑みて,思い切ってProcessingでのARプログラミングの本にすることにしました.
初心者にやさしいプログラミング言語として定評のあるProcessingを採用していますが,中身は本格的な応用編になっています. ARToolKitを始め,Arduino,Twitter,Kinect,AR.Droneなど,さまざまなインフラとの連携を解説しています. こんなにあれこれ手を出すのは正直大変でしたが,なんとか「全部入り」にできたのではないかなと思っています. また,プログラミング本と銘打ってますが,随所に最古・最新のAR研究の話題を盛り込んでいます. 中には思わず「なるほどこれはっ」となるものもあるはずです.
本屋さんで手にとられた際には,まず口絵のカラーページをご覧になってください.この本で何ができるかがだいたいわかると思います. お気に召しましたらぜひお買い求めください.
本書の読者サポートページも現在準備中です.
ARプログラミング ― Processingでつくる拡張現実感のレシピ 読者サポートページ
あと,おまけですが,当サイトのマスコットキャラの忍者くんの配布ページも正式に作りました.
忍者くん 3Dモデル素材集
2011年

仲間がたくさん増えたね.それとも兄弟?
2011/11/18
新宿から1駅の初台というところにICCというメディア・アートの美術館があります. 現在,フロアの大半はオープン・スペースとして無料で見ることができます. 今年の私のイチオシは「プロポーション」という作品です.これは,できれば"何も知らずに"鑑賞して欲しい作品です. 展示部屋に入ったら,まず右手のスクリーンに映る映像に注目してください. この作品には「ある仕掛け」があるのですが,それを知った後で,もう一度映像を見てください. きっと言葉では言い表せない感触を得られるはずです. これはおそらく,最初から知っていると感じることができないモノです. 僕はあの時感じた妙な感触こそが「リアリティの輪郭」なのではないかと思っています. ICCのオープン・スペースは翌年3月まで開催していますので,東京に足を運んだ際はぜひ.
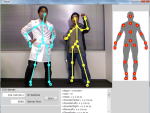 |
研究でKineX(キネックス)というものを作ったので公開します. KineXは,Kinectの骨格データをネットワーク経由で放流するソケットサーバです. KineXを使えば,ソケット通信が行える言語およびハードウェア(例えば,Flashやスマートフォン)において,Kinectを使ったアプリケーションを作成することができます. 以前作ったQPToolkitのKinect版だと思っていただければ結構です. 実は,まだ本命の機能を入れていないのですが,現バージョンでも需要があるため,公開することにしました.ぜひ使ってみてください. |
2011/09/12
USBで接続できるサブディスプレイを持っていると,ARデバイスを作ったり,展示用の小型モニタとして使ったりと,
いろいろと面白い使い方ができます.最近,裸眼3Dを楽しめるUSBディスプレイ
(RockVision 3D)
が登場したので,Processingでサクッと3D映像を表示するプログラムを書いて遊んでみました.
いやー,Processingはラクすぎて凄い.C/C++で同じコードを書こうとしたらきっと地獄見ますね.
Simple model viewer for 3D display (Interleave)
2011/02/26
デジタル一眼のLumix GF2を買いました.初めての一眼です.素人ながらいい感じのボケ味の写真が撮れるようになって喜んでます. 先日まで家でiPadがほこりかぶりかかってたのですが,撮った写真を見る(見せる)道具としては素晴らしいので,Camera Connection Kitを買って活用してます. さて,今回の更新はこちらです.
 |
今回は初のゲストライタとして,東京大学の吉田成朗さんをお招きしました! 吉田さんは,AR.Droneを制御するプログラムをProcessingで簡単に書けるライブラリ「ARDroneForP5」を作ってくれました. AR.Droneには公式のSDKがありますが,初心者にはちょっとハードルが高いのが難点です. その点,このライブラリは非常に簡単に操縦プログラムを作ることができます.これはかなり驚きです. ぜひお試しください! |
11/02/08
飛浩隆のSF小説「ラギッドガール」を積読にしていたのを思い出し,読んでいます. ARが好きな人の界隈では割と有名な作品でして,“現実世界に右クリック”をはじめとする非常に示唆的な言葉がいろいろ出てきます. 私たちが観測している現実/現実感とはなんなのかを考える良い機会を与えてくれるので,興味があったらぜひ手に取ってみてください.
で,今回の更新はこちらです.
 |
2010年度コンピュータビジョン最終課題作品集 明治大学で「コンピュータビジョン」という講義を担当しています. 内容としては,カメラの数学的モデルや3次元画像計測の話がメインなのですが, 実際に作ってみて理解を深めてもらおうという意図から, OpenCVやOpenGL,ARToolKitなどを使ったプログラミング演習を組み込みました. その最終課題として「カメラを使ったARアプリケーションを作る」というものを実施しました. なかなか個性的な作品が集まったのでどうぞお楽しみください. |
2010年

新居に移ったばかりの頃.ドロボーじゃないよひっこしだよ.
10/08/28
本当は明日のAR勉強会の準備でいっぱいいっぱいのはずなんですが, これだけはどうしても今日アップしたかったので,夜を徹して作業しました.というわけで,実に3年ぶりの新しい記事です.
 |
QPToolkit: Webカメラを使ったかんたん位置計測 QPToolkitという,ARToolKitをベースにした位置計測フレームワークを作りました. ロボットシステムや実世界指向インタフェースを作るときに,ARToolKitを使って対象のID認識や位置姿勢計測を やったことがある人は結構いると思いますが,あれをやるときのいろいろな手間を最小にしてくれるツールです. 苦もなく位置計測インフラを構築できるので,プロトタイピングにもおすすめです. |
